Mathematician Chad Giusti spoke with MAA FOCUS, the news magazine of the Mathematical Association of America.
Chad Giusti is an assistant professor of mathematics at Oregon State University. He works in pure and applied topology, with applications principally in neuroscience and complex systems. His work has appeared in journals such as PNAS and Crelle’s and has been supported by the NSF, AFOSR, and AFRL. Here, we learn about the fascinating work Chad has done in applying the tools of topological data analysis to problems in medicine and biology.
You are an expert in topological data analysis (TDA), a field that many people in our community are unfamiliar with. How would you describe TDA to someone who just finished the calculus sequence? How would you describe TDA to someone who has taken a standard introductory course in topology?
The usual quip is that topological data analysis characterizes complex systems or data in terms of qualitative notions of “shape.” I think this is at the same time too vague and too specific.
Calculus students are adept at describing shape in qualitative ways. A common exercise is to read off various information about a polynomial by looking at its graph or the graph of its derivative. By counting extrema and roots, examining behavior “at the ends,” and so on, we can determine things like the minimum possible degree, sign of the leading coefficient, and so on. While these are, in principle, numeric answers, they aren’t exact measurements — they’re bounds and ranges of possible values. Even if I only provide a scattering of points on the graph of the polynomial, it’s not much harder to provide the same data about the underlying polynomial.
For students, I would say that topology, particularly algebraic topology, provides a set of mathematical tools for a similarly qualitative characterization of more complex shapes: surfaces and higher dimensional analogues called manifolds, and more abstract structures like graphs. We most commonly formalize “qualitative” as meaning “up to continuous deformation” — stretching or compressing, without cutting or gluing. A circle remains a circle, topologically, even if we stretch it into a wiggly mess as we might do with a rope, so long as we don’t cut it open into a long strand or glue distant points together. This flexibility reduces the specificity of what we can say about systems, but it makes these descriptors more applicable in the presence of noise or incomplete data, both of which are particularly pernicious in biological and medical applications.
Students in an undergraduate topology course might not recognize much of what we do in TDA immediately. However, many will have seen the fundamental group of a topological space, or the topological classification of smooth surfaces, which are cousins of the kind of measurements and classifications we employ when studying “shape” in applications. However, data is rarely given to us in the form of a topological space—we must build approximations of our spaces from things like finite collections of points sampled on (or noisily near) a surface we want to study.
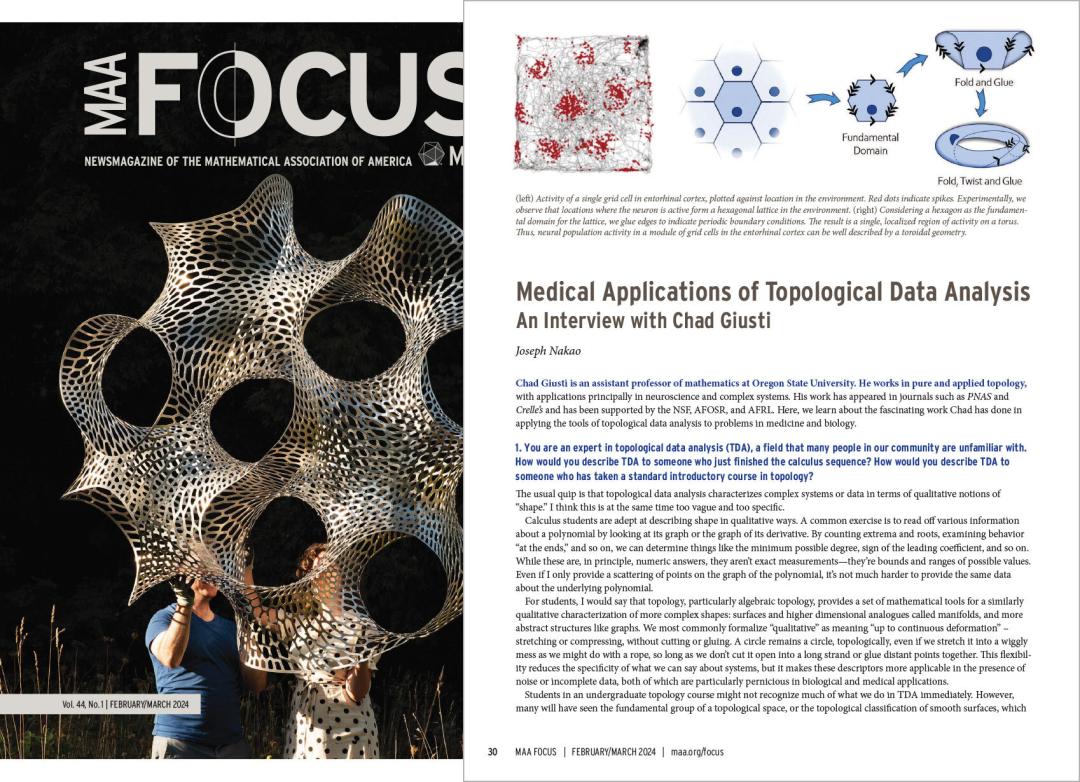
Currently, the most common tool used in TDA is called persistent homology, which characterizes how qualitative features of a shape evolve as some parameter changes. The parameter can be a measure of size (“how big are the features”), time (“when do the features appear”), or something more esoteric and domain dependent. Persistent homology gives us a collection of vector spaces associated to the space, much like the fundamental group gives us a group. By comparing these vector spaces across different data sets—results of some experiment under different conditions, for example—we can use the similarity or differences between the evolution of features to reason about how the underlying systems compare. Differences in shape can point to differences in organization in a complex system. For example, neural activity that encodes the head direction of a mouse is well-described by a circle, but that which describes the head direction of a bat generally requires a shape that can encode three dimensions of motion. (In fact, experimentally it appears to be a torus, not a sphere!)